Descrizione
Descrizione
- Progettato per le operazioni interne ed esterne che richiedono maggiore altezza da terra e manovrabilità più rapida
- Gestione del passo verticale massimo 155mm (6 “) (ostacolo)
- Tutto 802.11G (802.11N opzionale) connesso in modalità wireless
- Peso leggero (<20Kg) con eccellente capacità di carico utile
- Navigazione autonoma con GPS esterno e 9 DOF IMU
- Salire le scale basse (passo fino a 110 mm)
- Velocità: 0 – 15 km / h
La piattaforma mobile Dr. Robot Jaguar 4×4 è progettata per operazioni interne ed esterne che richiedono maggiore altezza da terra e manovrabilità più rapida. La piattaforma Jaguar-4×4 è una versione a ruote della piattaforma Jaguar-Lite. È guidato da quattro potenti motori (80 W), uno per ogni ruota. È robusto, leggero (<20 kg), veloce (max 15 km / h), con elevata altezza da terra (88 mm), compatto, resistente agli agenti atmosferici e all’acqua. È progettato per terreni difficili e in grado di superare gradini verticali fino a 155 mm e salire su scale basse (fino a 110 mm).
È completamente connesso in modalità wireless (802.11G). Integra GPS esterno e 9 DOF IMU (giroscopio / accelerometro / bussola) per la navigazione autonoma. Lo scanner video / audio e laser integrato ad alta risoluzione (opzionale) fornisce all’operatore remoto informazioni dettagliate sull’ambiente circostante. Oltre al software di controllo e navigazione pronto all’uso, è disponibile anche un kit di sviluppo completo che include SDK, protocollo dati e codici di esempio.
La figura seguente illustra i componenti chiave che verranno identificati sulla piattaforma mobile Dr. Robot Jaguar 4×4:
Scenario di operazione
Il diagramma seguente illustra lo scenario operativo tipico. La piattaforma mobile Dr. Robot Jaguar 4×4 è un robot mobile per esterni in rete wireless. Viene fornito con un AP / router 802.11 wireless. Il PC del controller host remoto che esegue il programma “Jaguar Control” si connette alla piattaforma mobile Dr. Robot Jaguar 4×4 tramite cavo di rete o wireless. L’utente finale potrebbe sviluppare il proprio programma di controllo del giaguaro utilizzando l’API e gli strumenti di sviluppo forniti.
È possibile utilizzare il controller Gamepad incluso per navigare nel robot. Se utilizzato all’aperto, in particolare sotto la luce solare diretta, il display montato sulla testa (non incluso) offre un display chiaro e ampio con un’eccellente esperienza all’aperto.
Caratteristiche:
• Piattaforma mobile robusta e affidabile per applicazioni interne ed esterne con manovrabilità più rapida (max 15 km / h)
• Custodia resistente alle intemperie e all’acqua
• Salita su pendenza> 45 ° o scale (max 110 mm o 4,5 “)
• Peso ridotto (<20 kg ) e design compatto con grande capacità di carico
• Gestione di un passo verticale di 155 mm (ostacolo)
• Scanner laser integrato (opzionale)
• Videocamera integrata ad alta risoluzione con audio
• Tutto 802.11G (opzionale 802.11N) connesso in modalità wireless
• Testa montata display (opzionale) e controller Gamepad che consente di operare all’aperto con una visione ampia e chiara anche sotto la luce diretta del sole
• Software di controllo e navigazione pronto all’uso
• Kit di sviluppo completo comprensivo di SDK, protocollo dati e codici di esempio, che supporta Microsoft® Robotics Studio, Microsoft® Visual Studio, NI LabVIEW®, MATLAB®, Java®
ricarica
Il robot Jaguar utilizza batterie LiPo ad alte prestazioni. È necessaria estrema cautela mentre si utilizza questo tipo di batteria, esplosione e danni potrebbero verificarsi. Leggere prima il manuale della stazione di ricarica e seguire tutte le regole di sicurezza prima di proseguire.
specificazioni
Mobilità
• Terreno: sabbia, roccia, cemento, ghiaia, erba, terra e altri umidi e asciutti
• Pendenza:> 45 °
• Passo verticale massimo: 155mm (6 “)
• Scala: altezza massima del gradino 110mm (4,5”)
• Poligonale:> 200mm (8 “)
• Velocità: 0 – 15Km / hr
• Raggio di sterzata: 0, minimo 750mm (29,5”) di diametro dello spazio di rotazione
• Altezza libera da terra: 88mm (3,5 “)
• Telecomando dell’operatore
• Navigazione autonoma con GPS e 9 DOF IMU (giroscopio / accelerometro / bussola)
• GPS di riferimento per visione interna (opzionale)
Sopravvivibilità
• Involucro resistente agli agenti atmosferici
• Temperatura: da -30 ° a + 50 °
• Telaio resistente agli urti
Elettronica
• Controller di movimento e rilevamento (PWM, posizione e controllo della velocità)
• 5Hz GPS e 9 DOF IMU (giroscopio / accelerometro / bussola)
• Laser scanner (4m o 30m) (opzionale)
• Sensore di temperatura e monitoraggio della tensione
• Fari
Video / Audio
• Telecamera a colori (640×480, 30fps) con audio
Comunicazione
• WiFi802.11G (WiFi 802.11N opzionale)
• Ethernet
• Seriale (RS232)
Porte ausiliarie esterne
• Ethernet (opzionale)
• Comunicazione di uso generale e porta di alimentazione (opzionale)
Unità di controllo dell’operatore
• Controller per gamepad
• Display montato sulla testina (Dual 640 x 480), equivalente al display da 60 “visualizzato in 2,7 m (9 piedi) (opzionale)
• Computer portatile (opzionale)
Alimentazione
• Batteria ricaricabile: LiPo 22.2V 10AH
• Caricabatterie LiPo con bilanciatore
• Tempo di funzionamento nominale: 2 ore (Opzionale 4 ore)
Motore
• Motori ruota (24 V): 4 unità
– Potenza massima (dopo la marcia in giù) (x4): Max 80W, 65Kg.cm
/ ruota – Corrente nominale: 2,75 A, Corrente massima 16 A
Carico utile
• Carico Carico utile: max 30Kg
• Carico utile di trascinamento: max 50Kg
Sviluppo di applicazioni
• Kit di sviluppo completo che include SDK, protocollo dati e codici di esempio, supporto Microsoft® Robotics Studio, Microsoft® Visual Studio, NI LabVIEW®, MATLAB®, Java®
Cosa è incluso
• Display montato sulla testina (dual 640 x 480 – opzionale)
• Telaio, ruote, mozzi antiurto • Motoriduttori 4×24
V
• Controller di movimento e rilevamento
• Controllo posizione e velocità PWM
• 5Hz GPS e 9DOF IMU
• Sensore di temperatura e monitoraggio della tensione integrati
• Fari
• Telecamera a colori (640 x 480, 30fps) con audio
• WiFi 802.11G
• Porta Ethernet e seriale (RS232)
• Batteria ricaricabile LiPo da 22,2 V, 10AH
• Caricabatterie LiPo con bilanciatore
• Completo kit di sviluppo incluso SDK, codice di esempio
link utili
File PDF
• Manuale della ruota Jaguar 4×4
• File ZIP della brochure Jaguar 4x4w • Specifiche del controller Jaguar
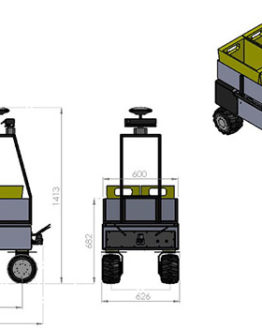
Dimensioni
• Larghezza : 530 mm ( 21″)
• Lunghezza: 570
mm ( 22,5 “) • Peso: 19,5 kg (configurazione standard)
Multimedia
Jaguar 4×4 Wheel Running